Cutting Tape
DexEXO: A Wearability-First Dexterous Exoskeleton for Operator-Agnostic Demonstration and Learning
TL;DR: DexEXO enables scalable dexterous demonstrations through a user-agnostic design and exact visual-kinematic embodiment.
Abstract
Read more Read less
Scaling dexterous robot learning is constrained by the difficulty of collecting high-quality demonstrations across diverse operators. Existing wearable interfaces often trade comfort and cross-user adaptability for kinematic fidelity, while embodiment mismatch between demonstration and deployment requires visual post-processing before policy training. We present DexEXO, a wearability-first hand exoskeleton that aligns visual appearance, contact geometry, and kinematics at the hardware level. DexEXO features a pose-tolerant thumb mechanism and a slider-based finger interface analytically modeled to support hand lengths from 140 mm to 217 mm, reducing operator-specific fitting and enabling scalable cross-operator data collection. A passive hand visually matches the deployed robot, allowing direct policy training from raw wrist-mounted RGB observations. User studies demonstrate improved comfort and usability compared to prior wearable systems. Using visually aligned observations alone, we train diffusion policies that achieve competitive performance while substantially simplifying the end-to-end pipeline. These results show that prioritizing wearability and hardware-level embodiment alignment reduces both human and algorithmic bottlenecks without sacrificing task performance.
Hardware Demonstrations
Click Video to Focus
Insert Battery
Plug USB
Sweeping Screws
Tweezer
Water Pouring
Policy Rollouts
Click Video to Focus
Pick Up Bottle
Open Carton
Pick and Place
Framework
Hardware Design
Data Collection to Policy Deployment Pipeline
The passive hand enables aligned visual observations, allowing direct raw image-to-training without any post-processing. Left is a demonstration video collected from the wrist camera, and the right video shows the wrist camera view during a policy rollout (8x speed).
Results
User Study: Subjective Feedback Results
A user study with 14 university participants (7 female, 7 male; ages 18-27) with hand lengths ranging from 165 mm to 195 mm evaluated DexEXO against DexUMI and vision-based teleoperation. DexEXO received significantly higher ratings for comfort, lower frustration, and greater finger independence, supporting its wearability-first design that accommodates a wide range of hand sizes without rigid alignment or per-user calibration.
User Study: Quantitative Performance Results
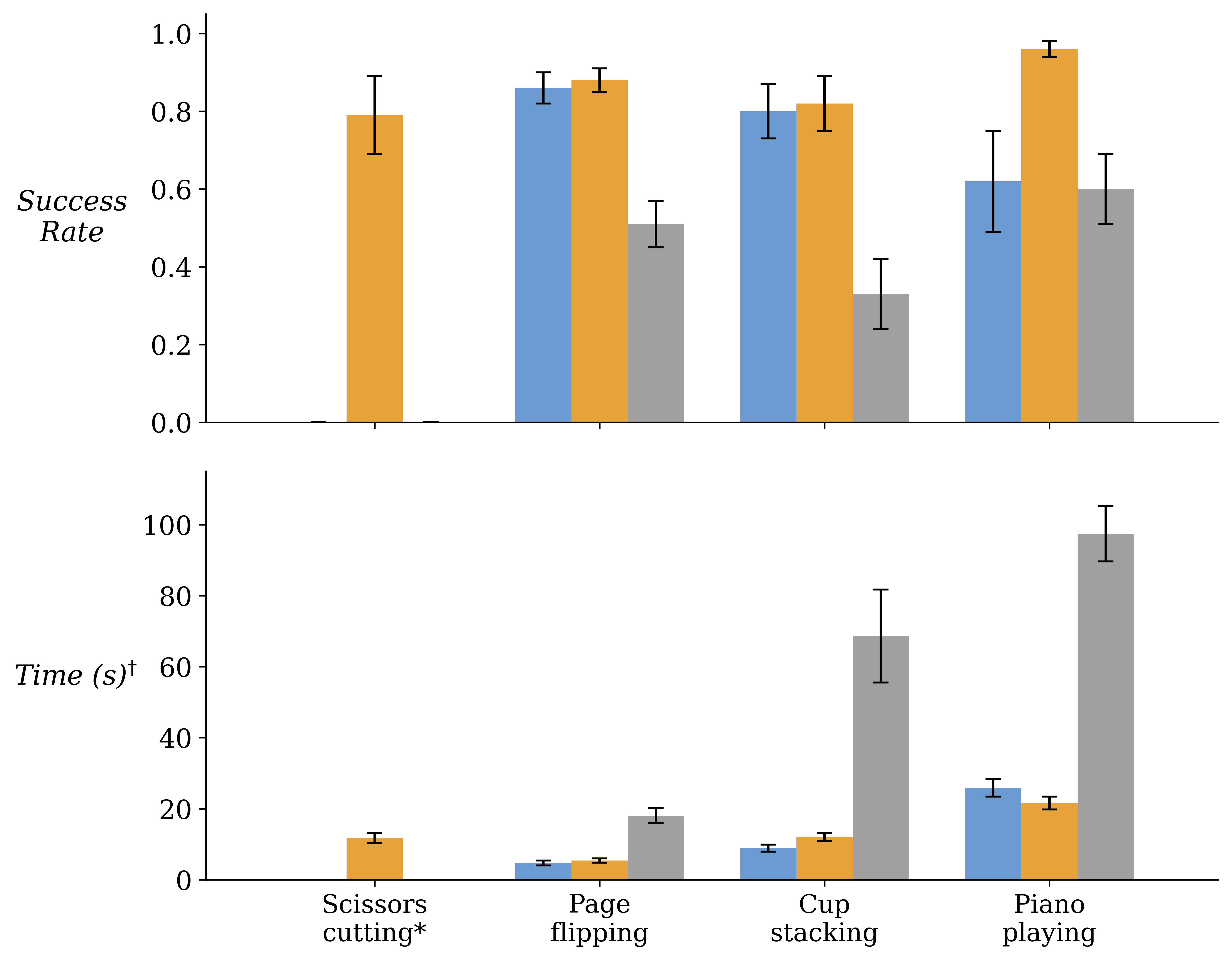
* DexUMI failed the scissors-cutting task because its added exoskeleton structure prevented the fingers from fitting into the scissor handles, whereas an actual XHand would have fit, while vision-based teleoperation lacked the precision and responsiveness needed to manipulate the scissors effectively.
DexEXO achieved the highest success rates on scissors cutting, piano playing, page flipping, and cup stacking, demonstrating robust cross-user operation.
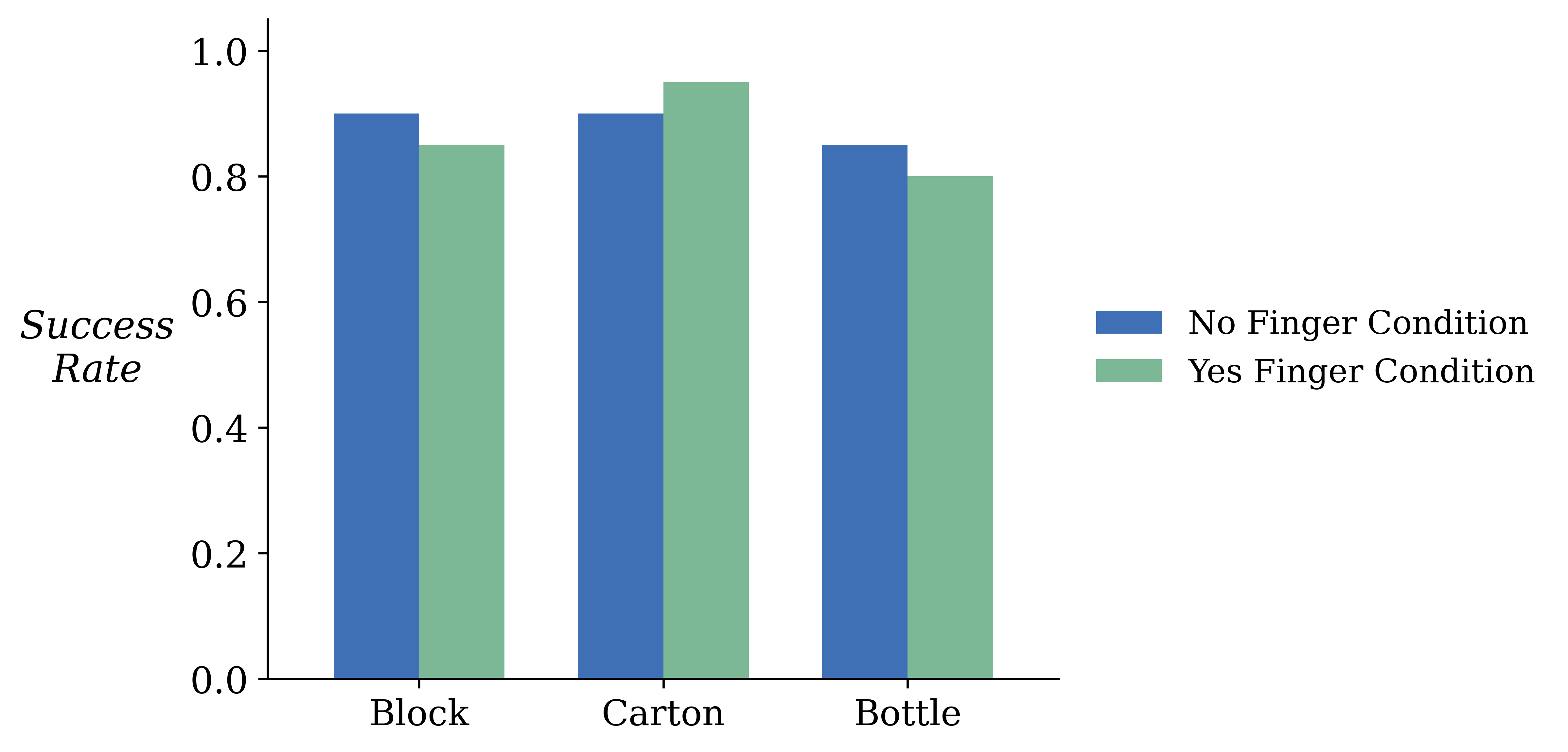
Policy Evaluation Comparisons
Full Video
Citation
BibTeX
Under review